飛行概要
- 飛行日: 2019年4月25日
- 飛行機体: Parrot Bebop 2
- 飛行目的: 工場内の人が容易に立ち入れない場所をドローンが自動巡回することが可能かどうかの検証
- 許可申請: 不要
検証方法
場所の選定について
廃工場のロケーションとして貸し出されているスタジオを利用し、その場所を実際の工場と見立てました。

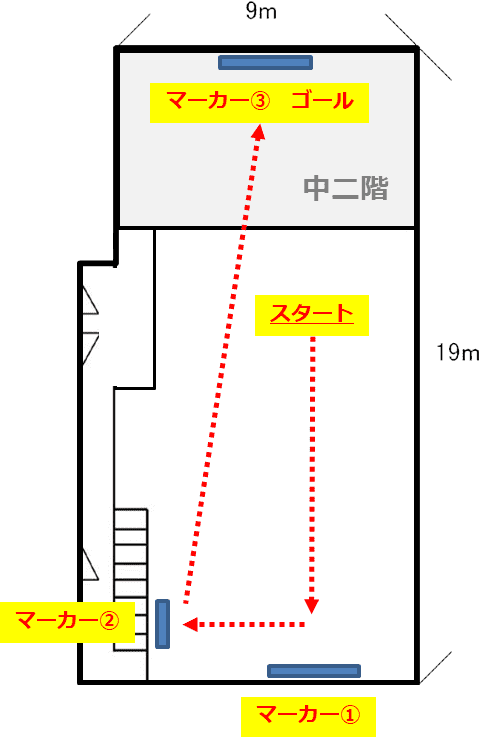
テスト飛行ルートについて
- スタート:マーカー①を設置した壁までの距離が10mの地点(地上)。
- マーカー①:地上から約3mの地点に設置。右ターンしてマーカー②へ。
- マーカー②:地上から約3mの地点に設置。右ターンしてマーカー③へ。
- マーカー③(ゴール):地上から約4.5m(中2階床から約1.5m)の地点に設置。
飛行ルート
検証作業
スタッフ4名(役割:緊急時コントローラー操作、緊急時捕獲網操作、PC操作、記録撮影)で小雨が降る天気の中、午後一時ごろ廃工場スタジオに到着しました。
事前に現場でテストをすることが出来なかったため、今回が広い室内空間での初飛行となりました。事前のシミュレーションでは発見できなかったバグがテスト飛行のたび次々見つかり、「修正しては飛行」を何度も繰り返しました。日も傾きかけた午後4時頃の6回目のフライトでやっとゴールまでたどり着くことがき、意を決して撮影用に7回のフライトを行い検証作業を終えました。

作業概要
記録動画は、手持ちのカメラでドローンを撮影した様子にマーカーを解析中のPC画面を合成しています。
スタート地点からはマーカー①が直接見えないよう、ドローンを反対向きに設置し、スタート信号はコントローラーからマニュアルで送りました。
まず、離陸後数秒間ホバリングを行った後、回転しなからマーカー①を探します。以降、マーカーの正面まで自動飛行を行い、所定位置で右ターンを行い次に指定されたマーカーを探していきます。今回は3つ目のマーカー③をゴールに設定しましたので、そこで自動的に着陸を行うようにプログラムしています。
補足
その場でバグを修正していた都合で、画面側の変更まで手が回らず、一部画面内の数値が正しく表示されていない箇所がありますがご了承願います。
また、解析中画面が時折モノクロ画像に替わるのは、マーカーの検出精度を上げるため一時的に2値化処理に切り替えた際の現象で、画像の転送エラーなどではありません。本来は、スタジオが暗くマーカーがはっきり捉えられない時のために組み込んだものですが、実際の現場は十分な明るさがあったにもかかわらず動作していました。
予想では、窓から入る日光や水銀灯の明かりによる逆光の影響でマーカーが認識辛くなったため作動したものと思われます。さらに、ゴール前でなかなか位置が決まらず、何度も前後の動きを繰り返していますが、これは撮影後のプログラムチェックでマーカーサイズに合わせた収束位置調整制御が正しく機能しないバグであったことがわかりました。
まとめ
これまでは、室内などの狭小空間でもマーカーによる自律飛行が出来ることを確認してきましたが、今回はそれに加え、広い(壁までの距離が遠い、高度差が大きい)空間でもマーカーによる制御が可能なことが確かめられました。場所に応じた細かなプログラムの最適化やマーカの設置方法の工夫は必要ですが、実用性の可能性については大きな期待が持てた検証でした。
GPSを利用できない室内空間で、いかに容易に、そして安価にドローンの活用の場を増やすことが出来るのかを今後もマーカーを活用した手法で検証して行きたいと思います。
ドローンの室内飛行では、そこで働く人達や稼働する機器に影響がないような安全で確実な飛行が重要です。ドローンbizでは引き続き、解析技術の応用とアイデアで、ドローンの活躍の場を増やしていけるよう努力してまいります。
当サイト内のお問い合わせフォームもしくは電話番号より、お問い合わせください。